Inverse Kinematics(2/2)
今日は、ビデオの35番目の2/2「Inverse Kinematics – Blender 2.80 Fundamentals」。 ビデオの7:00から。
残りは、あと少し。
前回の設定では、手と前腕部分の関節の部分が固定されている状態になっている。
理由は、IKを設定したBoneが前腕だったから。ほんとは、手のBoneに対して設定すれば問題ないということらしい。
ビデオでは、この操作を行わず(退屈だからって言ってる)代わりにIKのターゲットの向きと手の向きを揃える設定をしている。
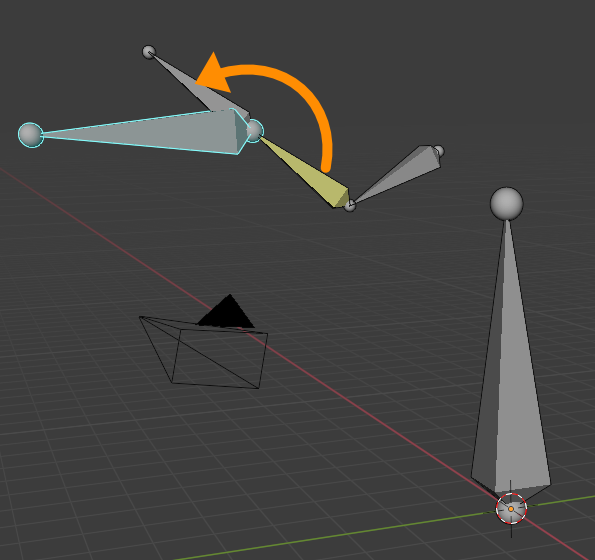
手のBoneを選択して、Bone Constraintタブを表示させる。Add Bone Constraint > Copy Rotationを選択する。TargetをAmatureに設定し、BoneをIK-Targetにする。これで、IK-TargetをGキーで移動する他に、Rキーで回転させて手の向きを変更できるようになった。(wireframe表示の方が重なっているBoneの動きを確認しやすい)
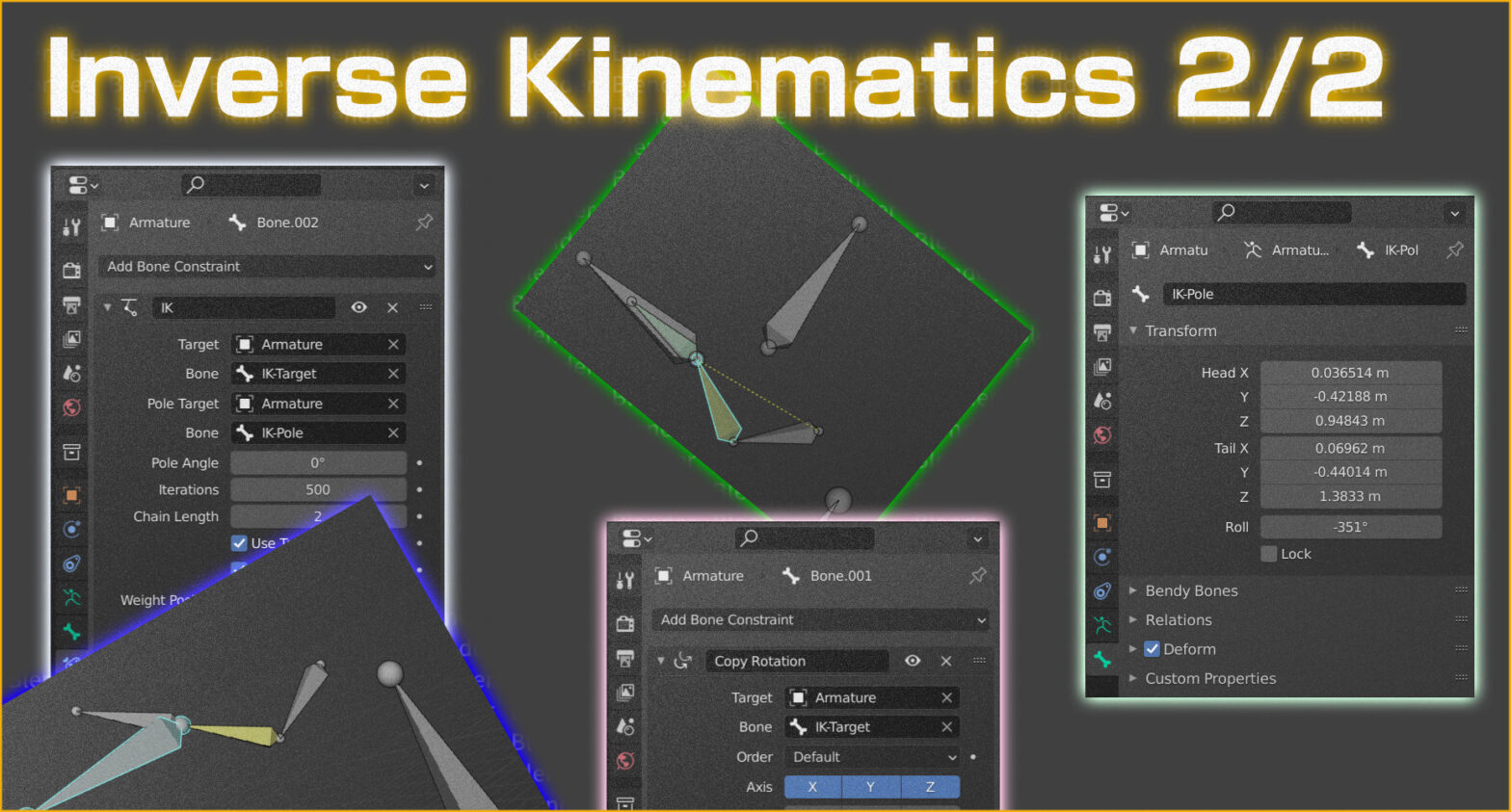
Gキーで移動したときの動きを腕の動きとして考えると上腕と前腕がありえない方向に曲がっていて変なのでPole Targetでこの部分を修正する。
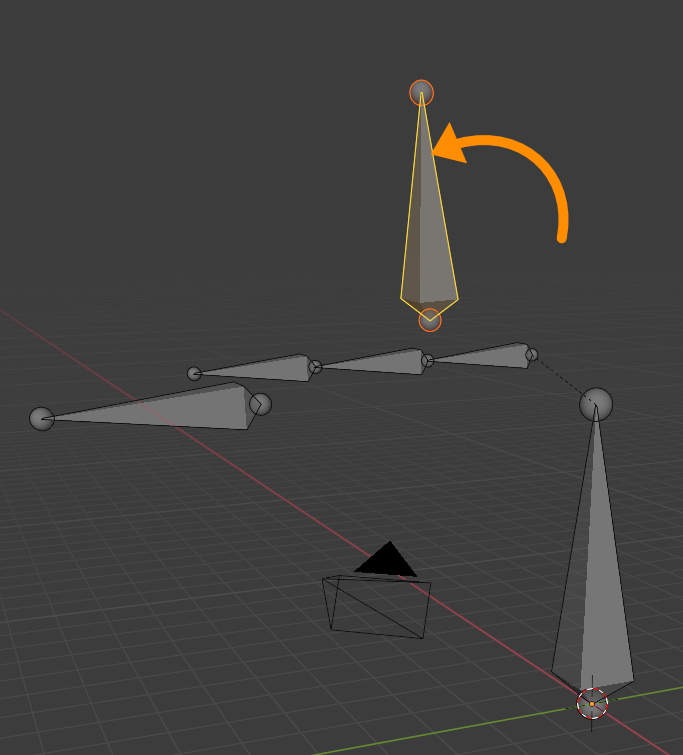
Edit Modeに変更してIK-Targetを選択し、Shift+Dで複製を作成して、関節のそばにGキーで移動、Rキーで向きを変更した。
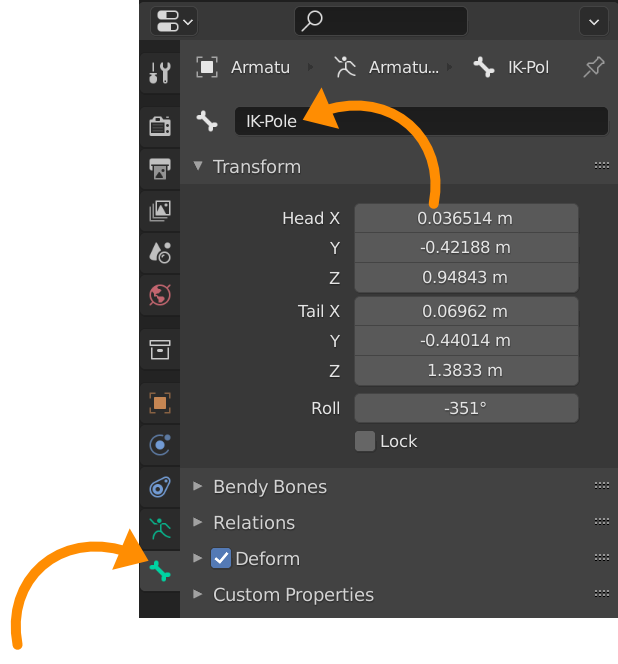
これをPole Targetに設定するので、Boneタブを選択して、名前をIK-Poleにした。
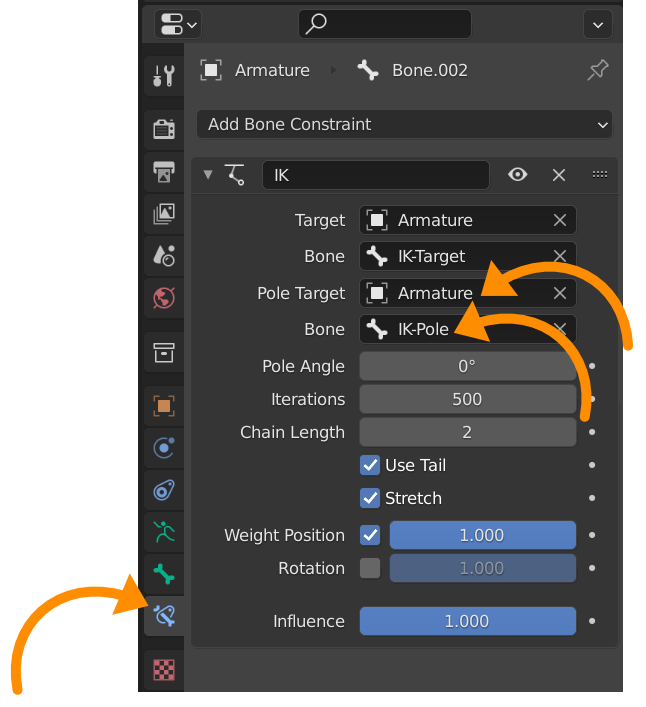
Pose Modeに変更して前腕のBoneを選択して、Bone Constraintタブを表示させる。Pole TargetをArmatureにし、BoneをIK-Poleに設定する。
この状態で前腕を選択して、Gキーでドラッグすると今度は、関節が曲がらなくなる。(まっすぐな関節をPole Targetで制御できない?らしい)
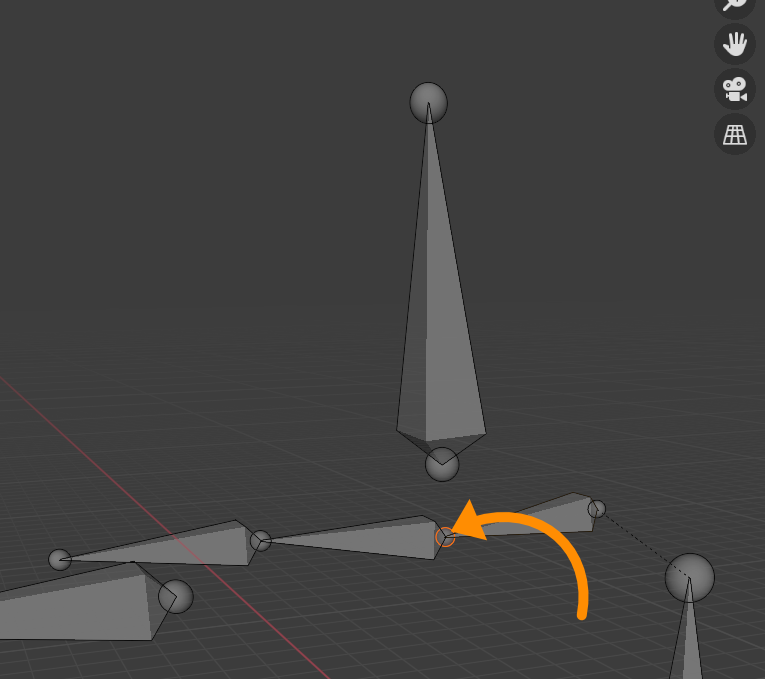
Edit Modeに切り替えてジョイントを選択してGキーでほんの少しだけ移動する。
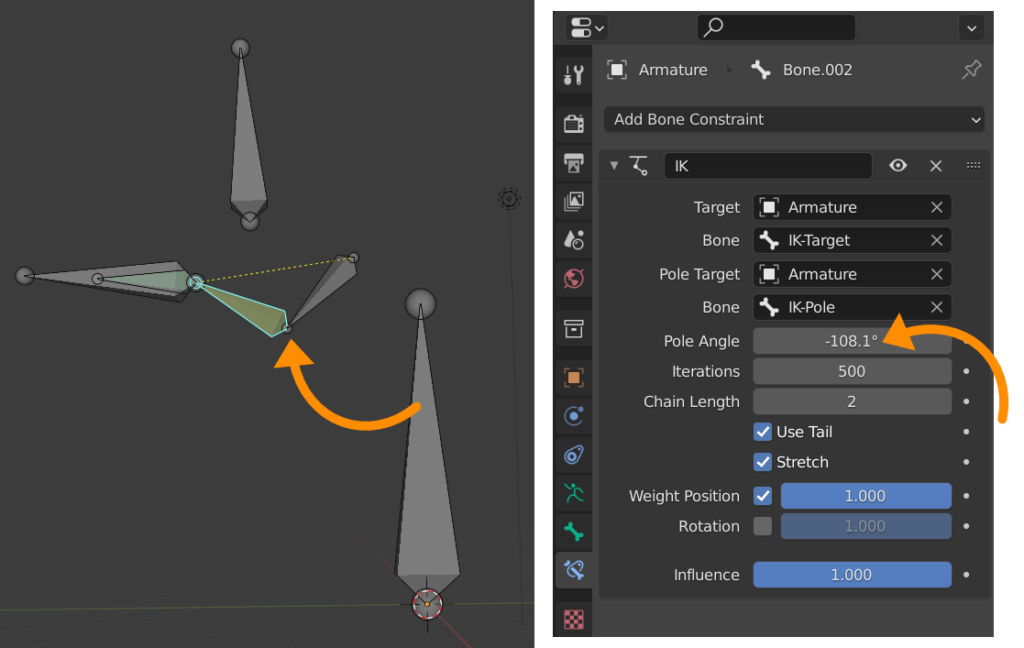
Pose Modeに変更して肘が曲がる状態にして、Pole Angleで肘が下方向に曲がるように調節した。